Mechanical Validation
Functional requirements and measured performance. Spec denotes the design target derived from cited work. ROM spec denotes minimum coverage and can be exceeded.
| Requirement |
Spec |
Ours |
Meets |
| Rated torque (Nm) |
≥ 3 |
3.75 ± 0.05 |
✓ |
| Backdrive torque (Nm) |
≤ 0.4 |
0.33 ± 0.06 |
✓ |
| Hardstop load cap. (Nm) |
≥ 9 |
≥ 14 |
✓ |
| Axial load cap. (kg) |
≥ 15 |
≥ 100 |
✓ |
| No-load speed (rpm) |
≥ 53.3 |
96.6 ± 9.4 |
✓ |
| Torque BW (Hz) @ 3.75 Nm |
≥ 10 |
10.15 ± 1.34 |
✓ |
| Angular precision (deg) |
≤ 3.47 |
1.65 |
✓ |
| F/E ROM (deg) |
[−40°, 40°] |
[−40°, 40°] |
✓ |
| R/U ROM (deg) |
[−10°, 30°] |
[−40°, 40°] |
✓ |
| Width (mm) |
≤ 61.4 |
64 |
✗ |
| Height (mm) |
≤ 61.4 |
66.5 |
✗ |
| Length (mm) |
≤ 195.5 |
178.2 |
✓ |
| Weight (kg) |
≤ 1.0 |
0.97 |
✓ |
Load capacity values are tested-to values that were loaded to without failure.
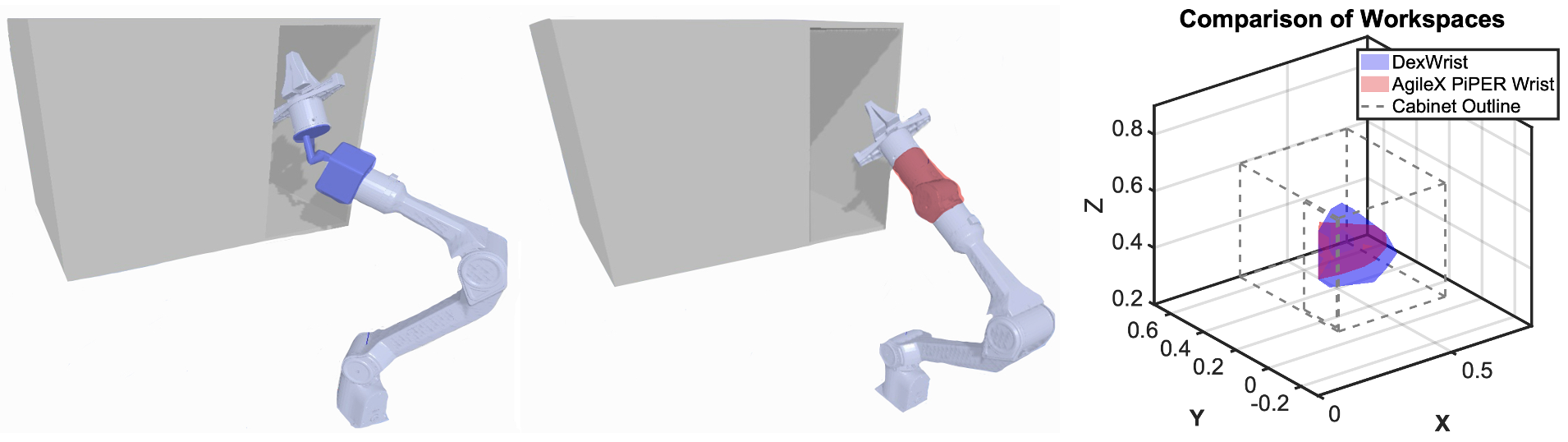
DexWrist provides F/E and R/U only; P/S is assumed upstream.
Width and height exceed the anthropometric target by only 4% and 8%, respectively, due to the driving links.
 (Under Review)
(Under Review)