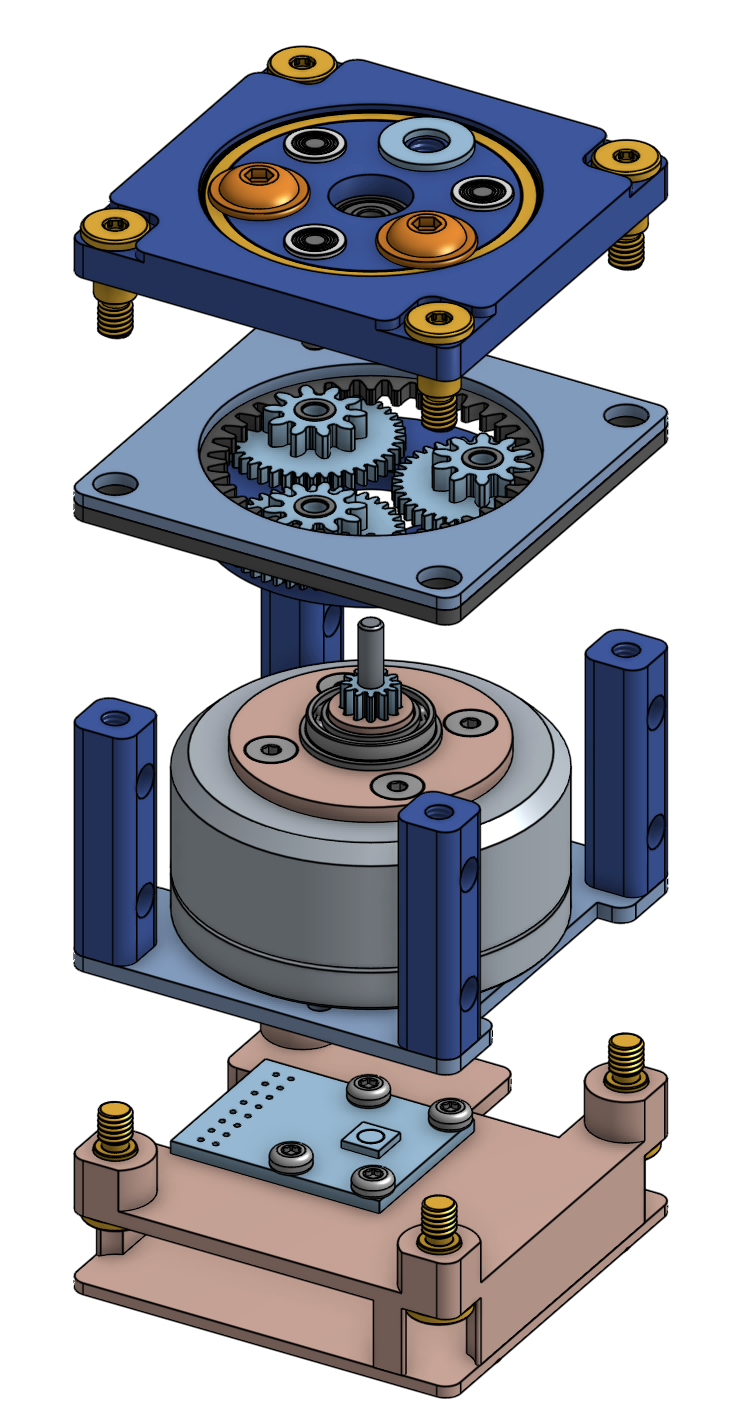
DexWrist: A Robotic Wrist for Constrained and Dynamic Manipulation
MIT1
 (Under Review)
(Under Review)
Join Waitlist to
Purchase a DexWrist!